


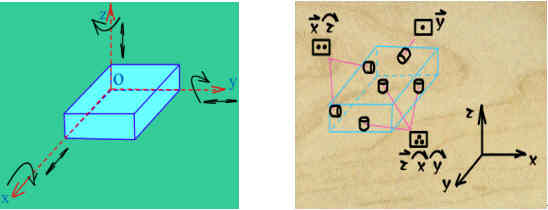
(一)六点定位原理
任何未定位的工件在空间直角坐标系中都具有六个自由度。工件定位的任务就是根据加工要求限制工件的全部或部分自由度。工件的六点定位原理是指用六个支撑点来分别限制工件的六个自由度,从而使工件在空间得到确定定位的方法。
(二)支承点与定位元件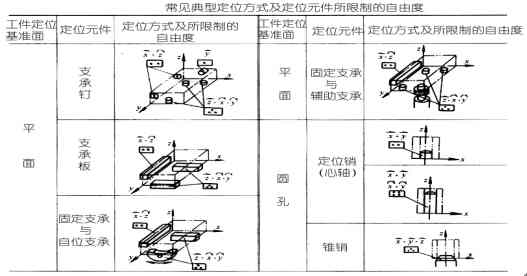
上图为常见定位方式中的定位元件所限制的自由度和相当的支承点数
(三)完全定位与不完全定位
工件的六个自由度完全被限制的定位称为完全定位。按加工要求,允许有一个或几个自由度不被限制的定位称为不完全定位。
(四)欠定位与过定位
按工序的加工要求,工件应该限制的自由度而未予限制的定位,称为欠定位。在确定工件定位方案时,欠定位时绝对不允许的。工件的同一自由度背二个或二个以上的支撑点重复限制的定位,称为过定位。在通常情况下,应尽量避免出现过定位。
消除过定位及其干涉一般有两个途径:其一是改变定位元件的结构,以消除被重复限制的自由度;其二是提高工件定位基面之间及夹具定位元件工作表面之间的位置精度,以减少或消除过定位引起的干涉。


 客服1
客服1 